Robotics for everyone
Whether you're picking up your first Arduino or wondering how to set up a CAN bus, Weekly Robotics has you covered. Friendly, practical, jargon-light guides published every Monday.

This week's guide
Six Months In: What We've Learned and What's Coming Next
We've covered a lot of ground in 26 weeks. Here's a recap of the journey so far, answers to the most common reader questions, and a preview of what's coming in the next six months.
Read tutorial →Recent tutorials
Debugging Hardware: A Systematic Approach
Hardware bugs are different from software bugs — you can't just add a print statement. This guide covers the tools and techniques for diagnosing hardware problems.

Designing Your First Robot Chassis
The chassis is the skeleton of your robot. Learn the key design decisions — wheel configuration, center of mass, motor mounting — that determine how well your robot moves.
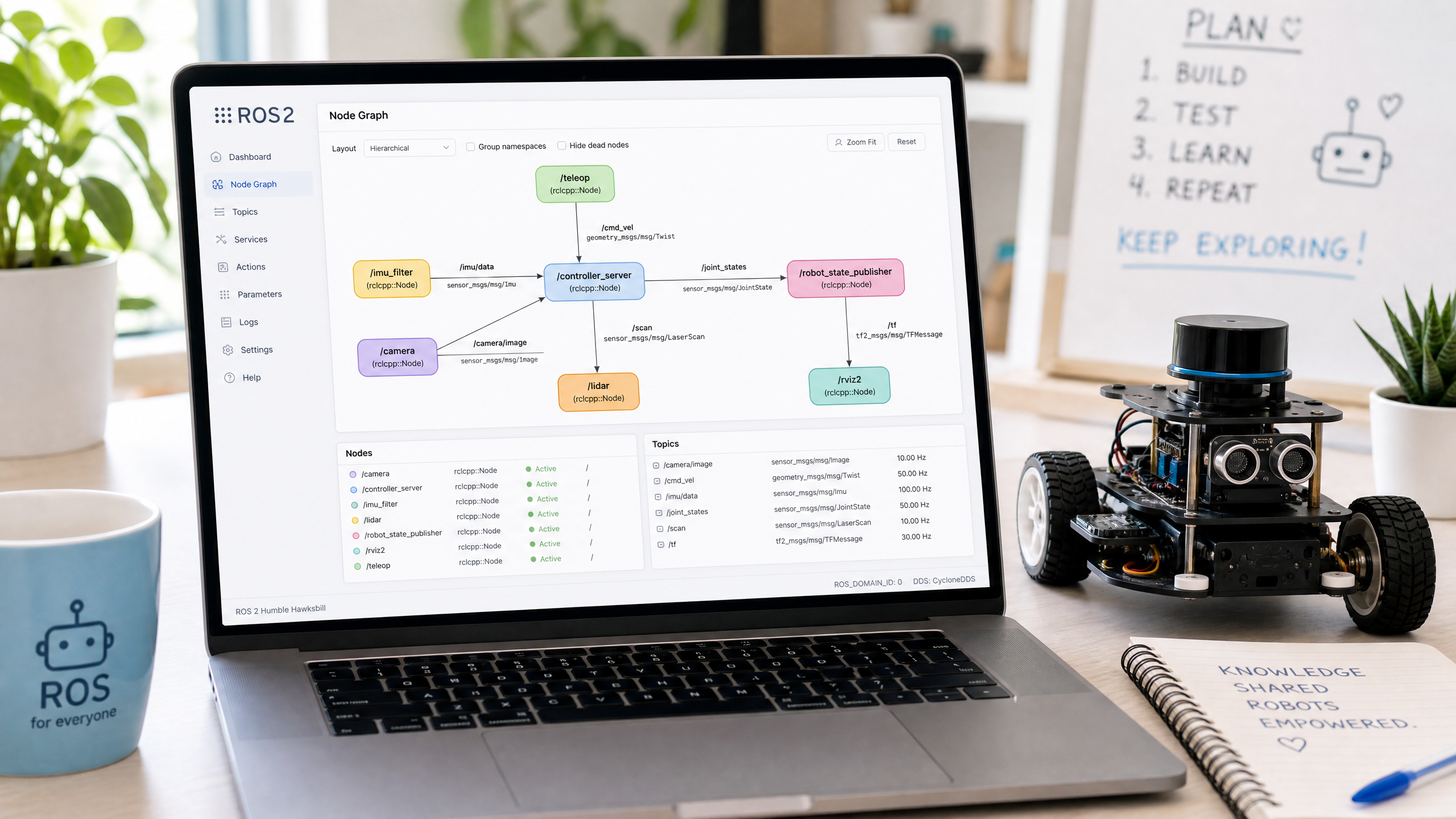
Understanding TF2: Coordinate Frames in ROS2
TF2 is the ROS2 library for tracking coordinate frames. Understanding it is essential for any robot that needs to know where things are in 3D space.

Object Detection with OpenCV and YOLO
Teach your robot to recognize objects in real time using OpenCV and the YOLO neural network. Runs on a Raspberry Pi with a standard USB camera.
Wireless Communication for Robots: WiFi, Bluetooth, and LoRa
Cutting the cord opens up new possibilities. Compare WiFi, Bluetooth, and LoRa for different robotics applications, with practical setup guides.

SLAM: Building a Map While You Navigate
Simultaneous Localization and Mapping (SLAM) is how robots build a map of an unknown environment while keeping track of their own position within it.
Browse by topic
Getting Started
Microcontrollers, first circuits, choosing your platform
Communication
CAN bus, I2C, SPI, UART — making components talk
Sensors & Vision
Cameras, LiDAR, IMUs, and depth sensing
Software & AI
ROS2, reinforcement learning, simulation environments
Mechanics & Build
Motors, 3D printing, chassis design, power systems
Control Systems
PID controllers, feedback loops, motion planning