All Tutorials
26 guides covering everything from your first circuit to advanced control systems.

Six Months In: What We've Learned and What's Coming Next
We've covered a lot of ground in 26 weeks. Here's a recap of the journey so far, answers to the most common reader questions, and a preview of what's coming in the next six months.
Debugging Hardware: A Systematic Approach
Hardware bugs are different from software bugs — you can't just add a print statement. This guide covers the tools and techniques for diagnosing hardware problems.
Designing Your First Robot Chassis
The chassis is the skeleton of your robot. Learn the key design decisions — wheel configuration, center of mass, motor mounting — that determine how well your robot moves.
Understanding TF2: Coordinate Frames in ROS2
TF2 is the ROS2 library for tracking coordinate frames. Understanding it is essential for any robot that needs to know where things are in 3D space.

Object Detection with OpenCV and YOLO
Teach your robot to recognize objects in real time using OpenCV and the YOLO neural network. Runs on a Raspberry Pi with a standard USB camera.
Wireless Communication for Robots: WiFi, Bluetooth, and LoRa
Cutting the cord opens up new possibilities. Compare WiFi, Bluetooth, and LoRa for different robotics applications, with practical setup guides.
SLAM: Building a Map While You Navigate
Simultaneous Localization and Mapping (SLAM) is how robots build a map of an unknown environment while keeping track of their own position within it.
Robot Arm Kinematics: How Arms Know Where to Move
Forward and inverse kinematics are the mathematics that let a robot arm reach a target position. This guide explains the concepts without drowning you in equations.
ROS2 Navigation Stack: Autonomous Mobile Robots
The Nav2 stack gives your robot the ability to navigate autonomously from point A to point B, avoiding obstacles along the way. Here's how to get started.
Wheel Encoders: Knowing Where You Are
Encoders measure how far your wheels have turned, enabling odometry — dead reckoning navigation. Learn about quadrature encoders and how to read them.
Servo Motors: Precise Position Control for Robot Joints
Servo motors are the joints of a robot. Learn the difference between hobby servos and industrial servo systems, and how to control them with PWM.

Simulating Your Robot Before Building It: An Introduction to Gazebo
Simulation lets you test your robot software without risking expensive hardware. Learn how to set up Gazebo with ROS2 and simulate a simple differential drive robot.

Powering Your Robot: Batteries, Regulators, and Power Distribution
Power is one of the most overlooked aspects of robot design. Get it wrong and your robot behaves erratically or damages itself. This guide covers everything you need to know.
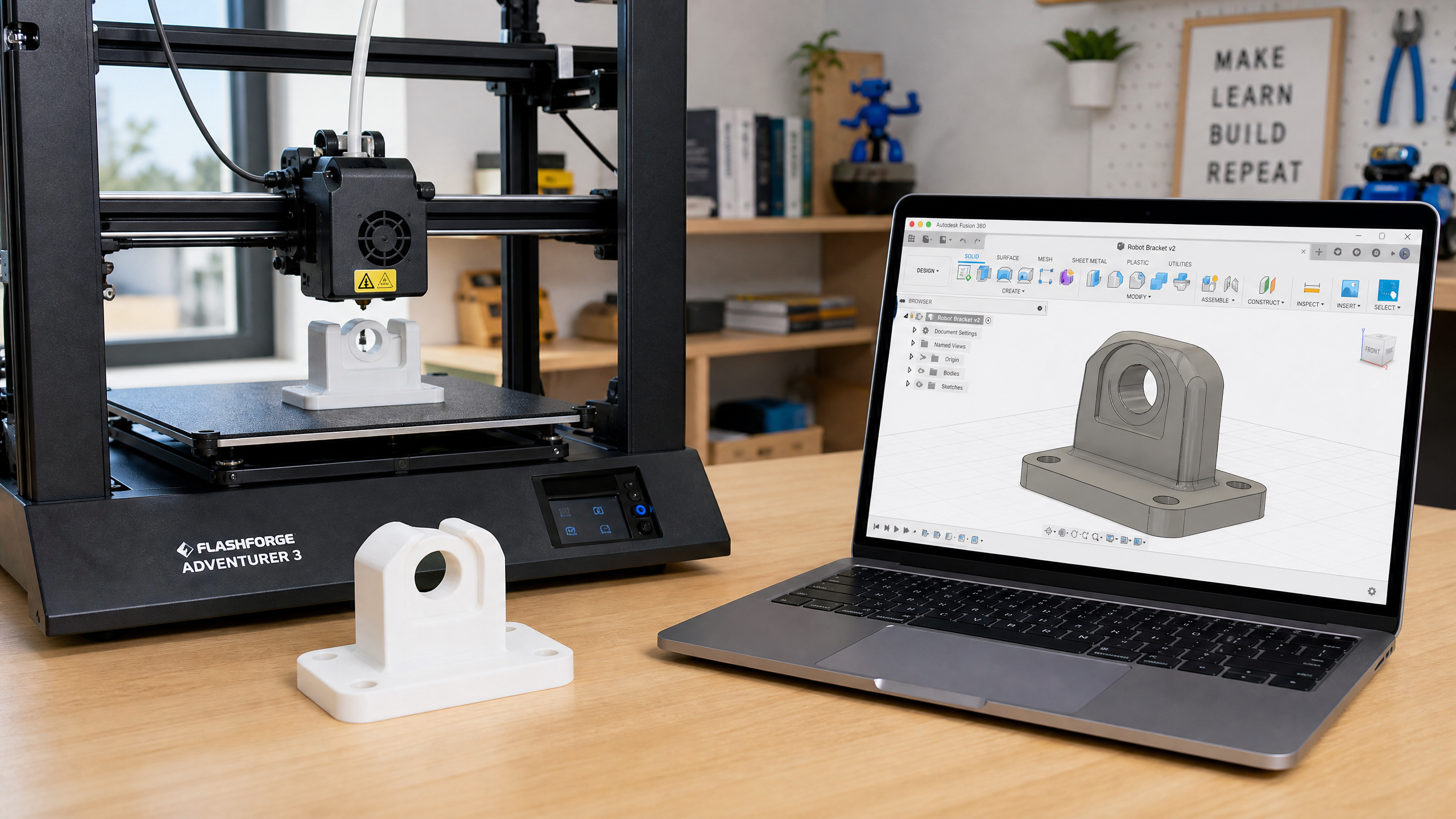
3D Printing Robot Parts: From CAD to Physical Component
3D printing has transformed robotics by making custom parts accessible to everyone. Learn the basics of designing and printing parts for your robot.

PID Control: The Algorithm That Runs the World
PID controllers are in everything from thermostats to spacecraft. Understanding them is essential for any roboticist. This guide explains the concept clearly and shows you how to implement one.
Understanding IMUs: Measuring Motion and Orientation
An IMU (Inertial Measurement Unit) tells your robot which way is up, how fast it's turning, and how it's accelerating. Here's how to use the MPU-6050 with Arduino.
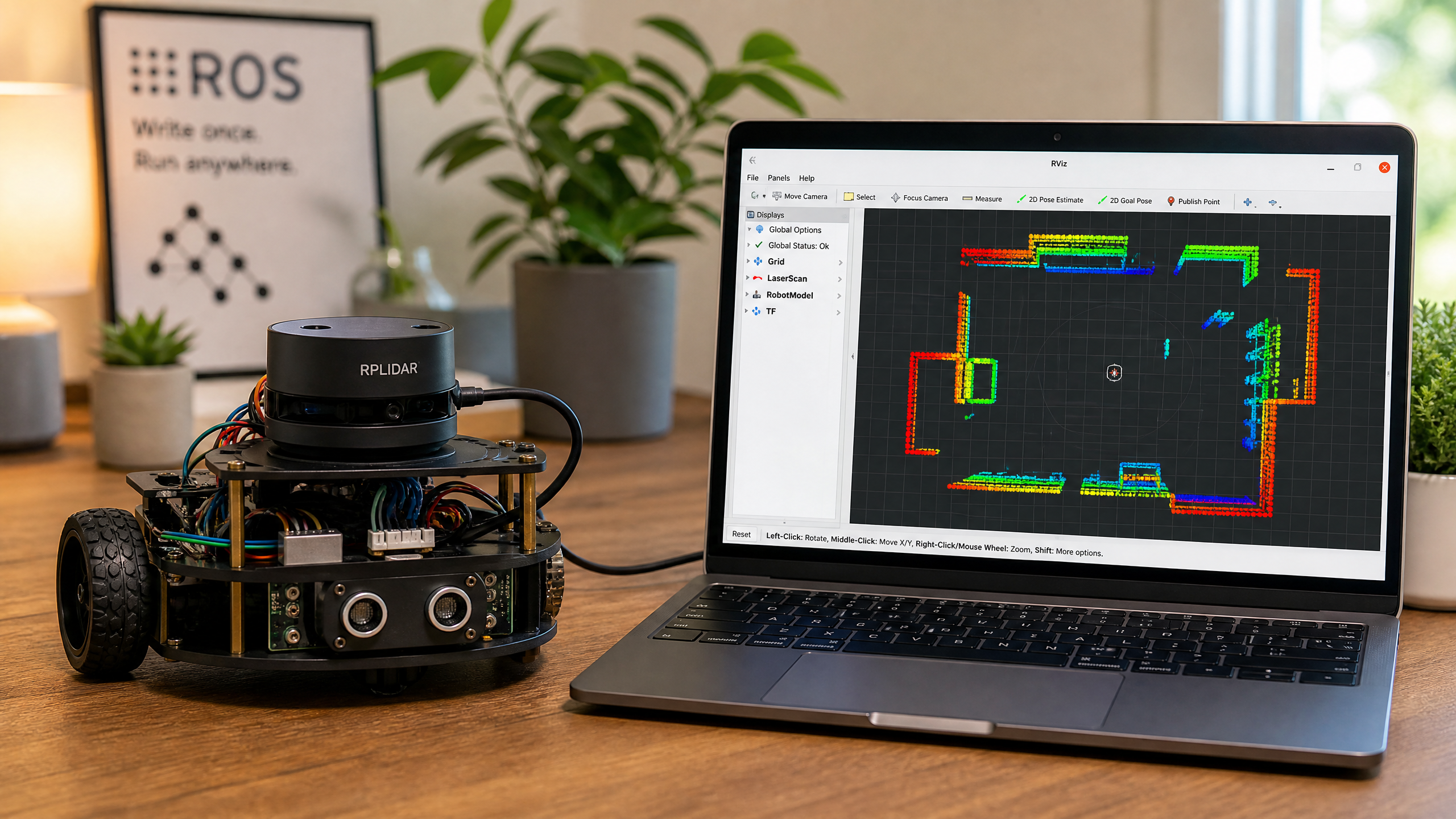
LiDAR for Robots: From Theory to Your First Scan
LiDAR gives your robot a 360-degree view of its surroundings. Learn how it works, meet the RPLIDAR A1, and see how to visualize scan data in ROS2.
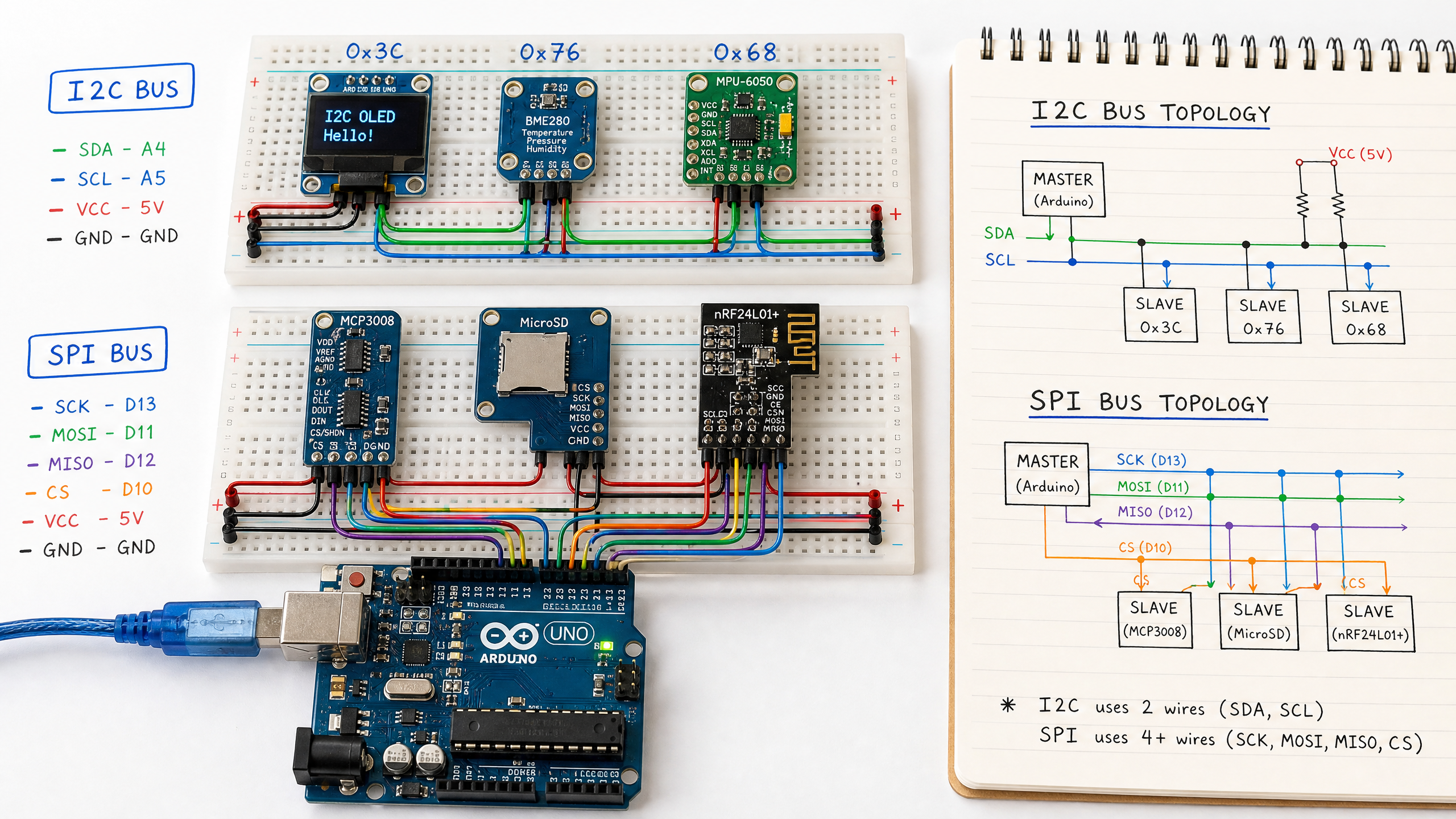
I2C and SPI: The Two Most Common Communication Protocols
After CAN bus, I2C and SPI are the protocols you'll use most often to connect sensors and peripherals to your microcontroller. Here's how they work and when to use each.
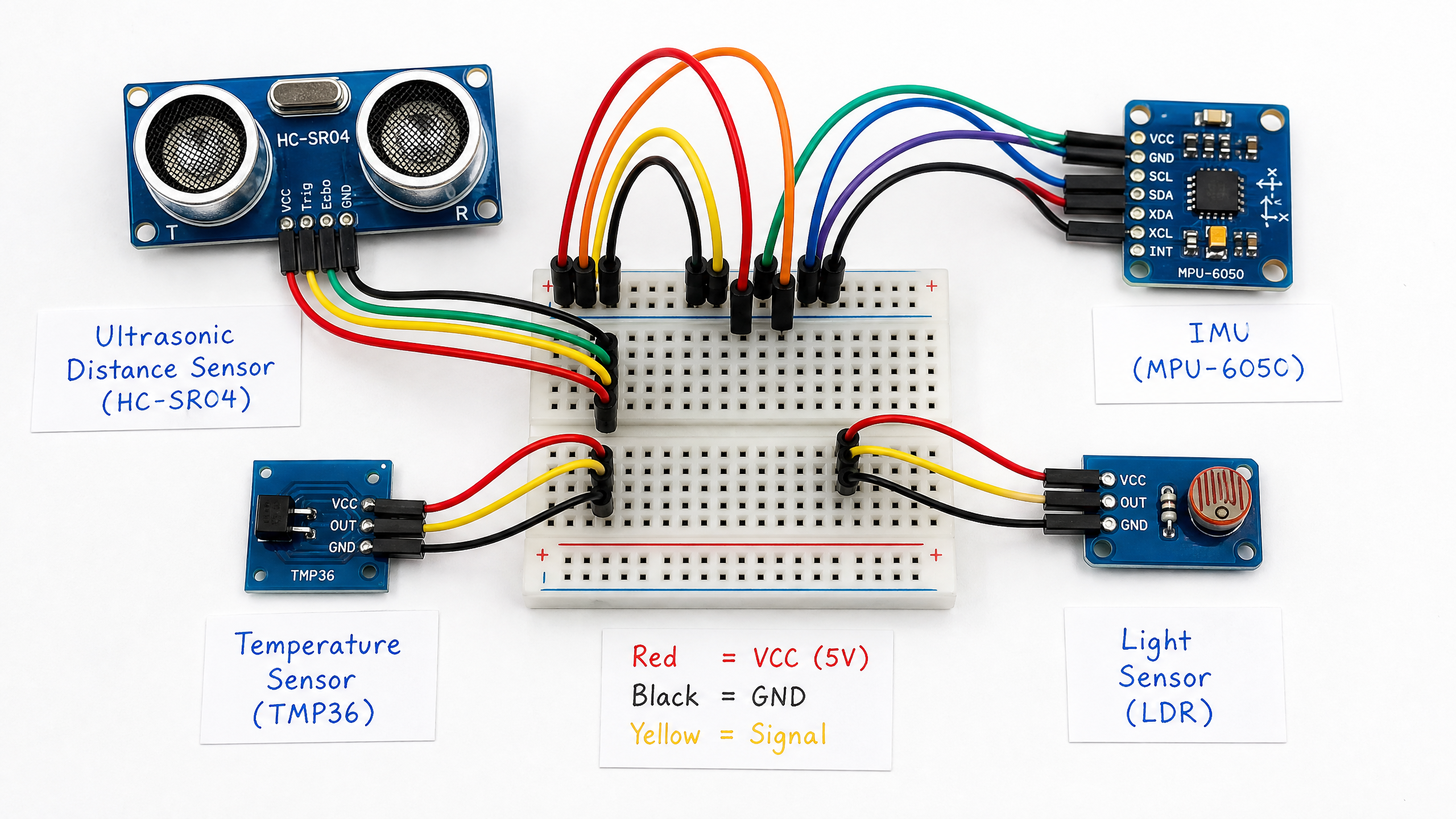
Your Robot's First Sense: Ultrasonic Distance Sensors
The HC-SR04 ultrasonic sensor is one of the most useful tools in a beginner's kit. Learn how it works, how to wire it up, and how to use it for obstacle avoidance.
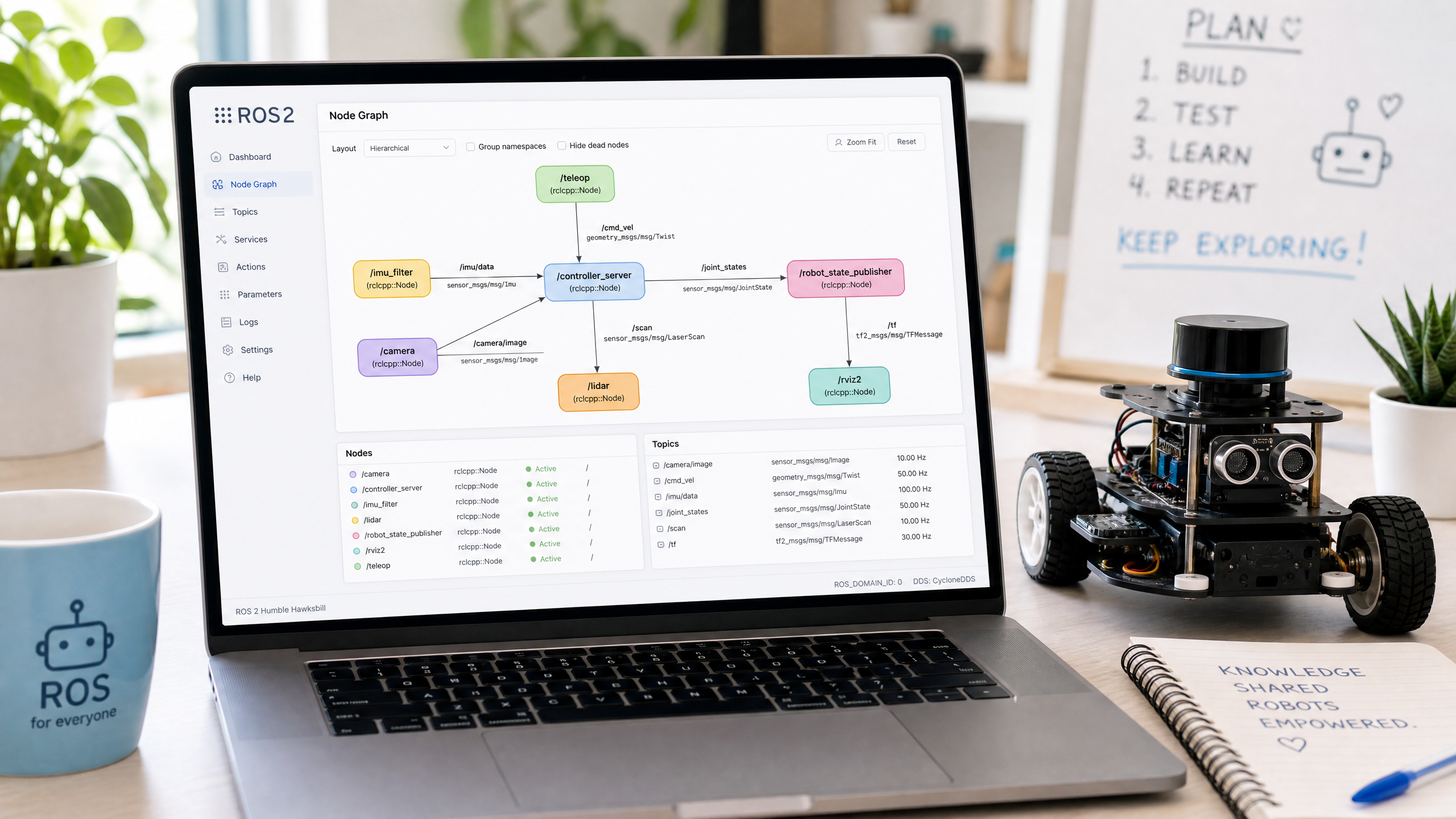
Getting Started with ROS2: Your First Node
ROS2 is the standard middleware for serious robotics. This guide explains what it is, why it matters, and walks you through installing it and writing your first publisher and subscriber.

Choosing the Right Reinforcement Learning Framework
Stable Baselines3, Ray RLlib, or something else? This guide explains what reinforcement learning is, when it's useful for robotics, and how to choose and get started with the right framework.
Seeing the World: 3D Cameras vs 2D Cameras
What's the difference between a standard webcam and a depth camera? When does your robot need to see in 3D? This guide breaks down the options clearly.
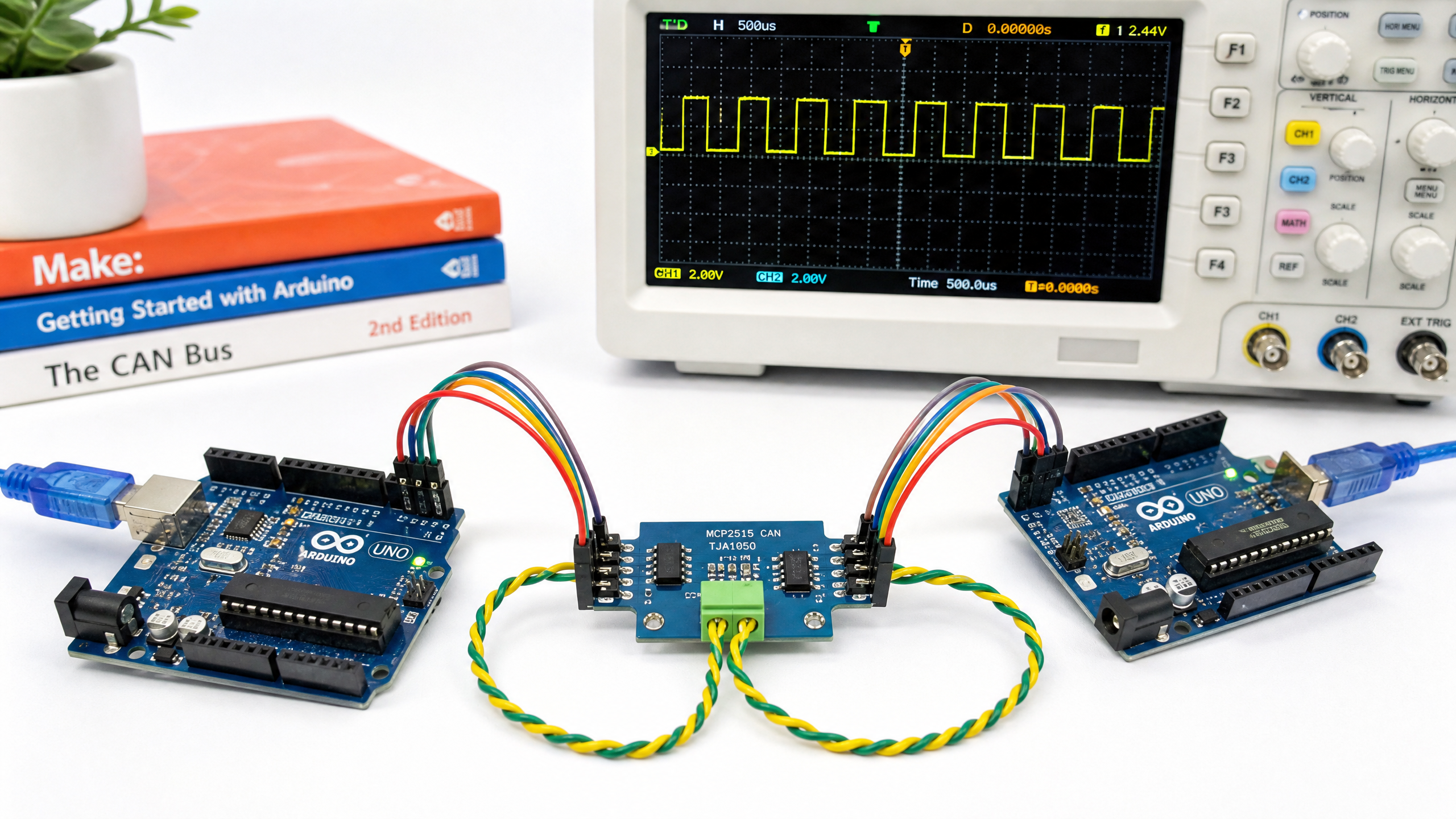
Setting Up CAN Bus for Robotics
CAN bus is the communication protocol that runs modern cars — and increasingly, robots. Here's what it is, why it matters, and how to set it up with two Arduinos and an MCP2515 module.
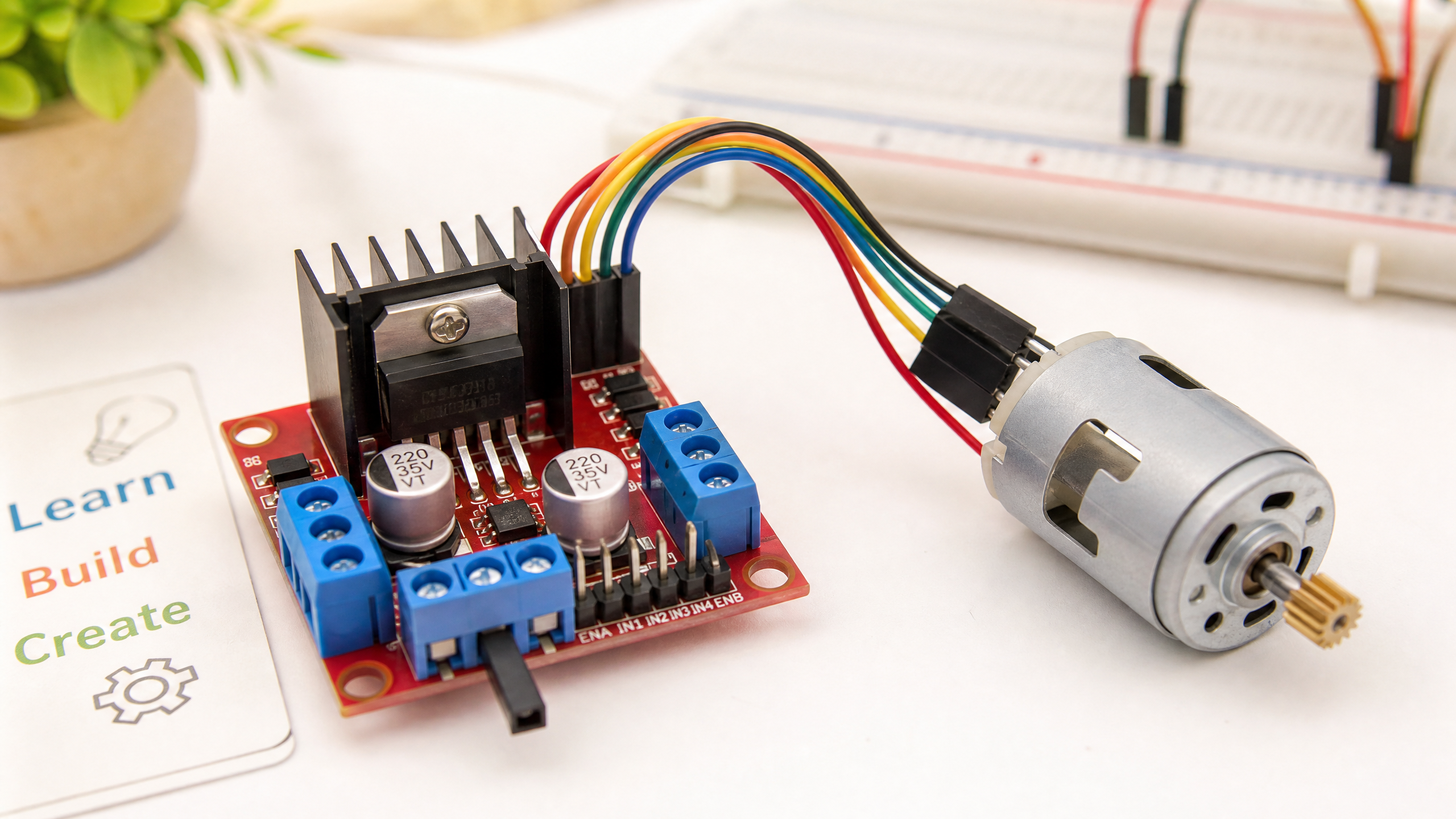
Making Things Move: A Beginner's Guide to Motor Drivers
You can't connect a motor directly to a microcontroller. Here's why, and how motor driver ICs like the L298N bridge the gap — with working Arduino code.
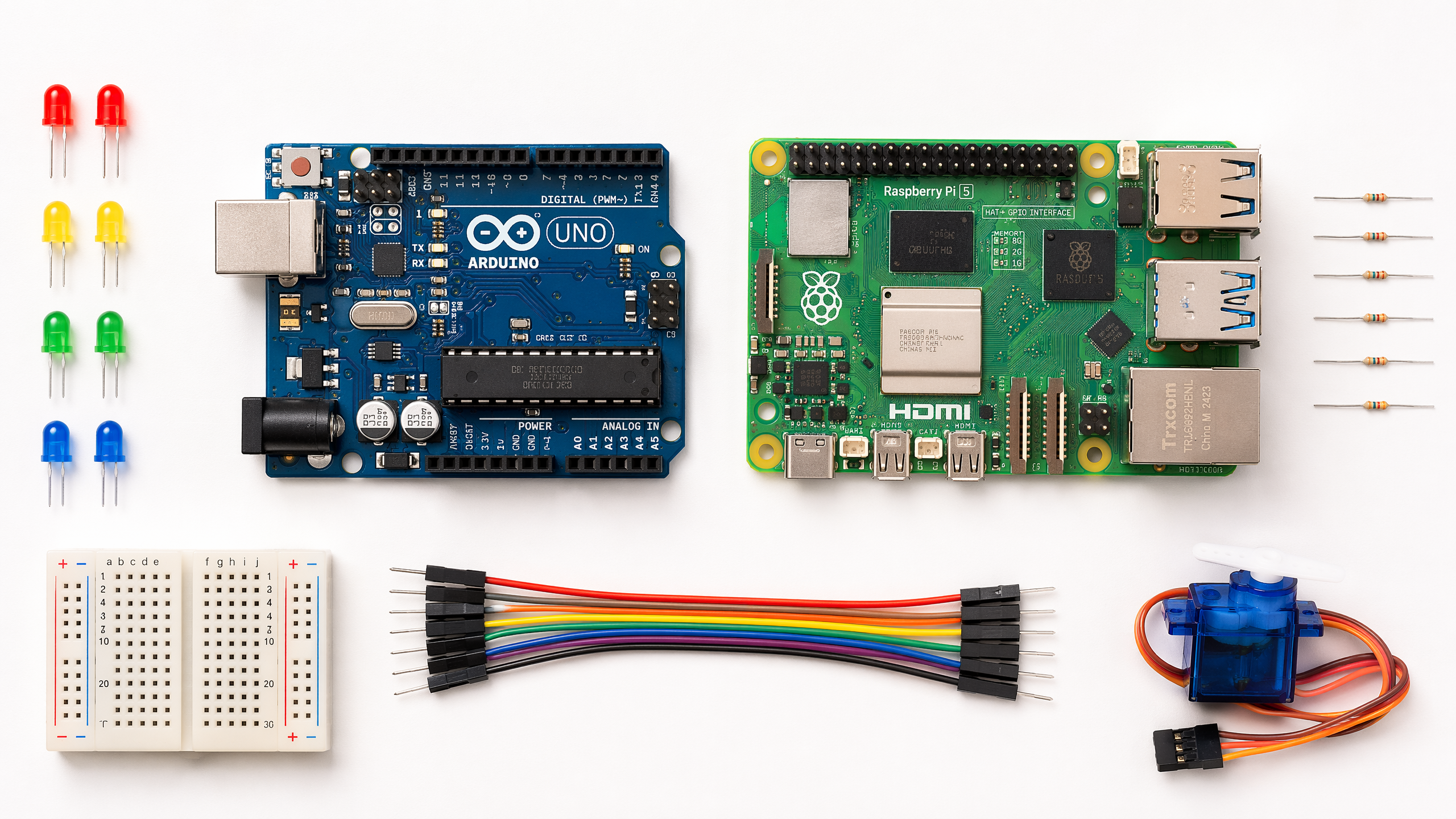
The Brains of the Operation: Microcontrollers vs Microprocessors
Arduino or Raspberry Pi? Microcontroller or microprocessor? This guide explains the difference, when to use each, and how to choose for your first robot project.
Welcome to Weekly Robotics!
Every Monday, a new beginner-friendly robotics tutorial lands here. Here's what to expect, who this is for, and how to get the most out of it.